Motion Design
/
Produktvideo
/
Prozedurale Animation
Procedural Assembly
(
6
)

/ Über das Projekt
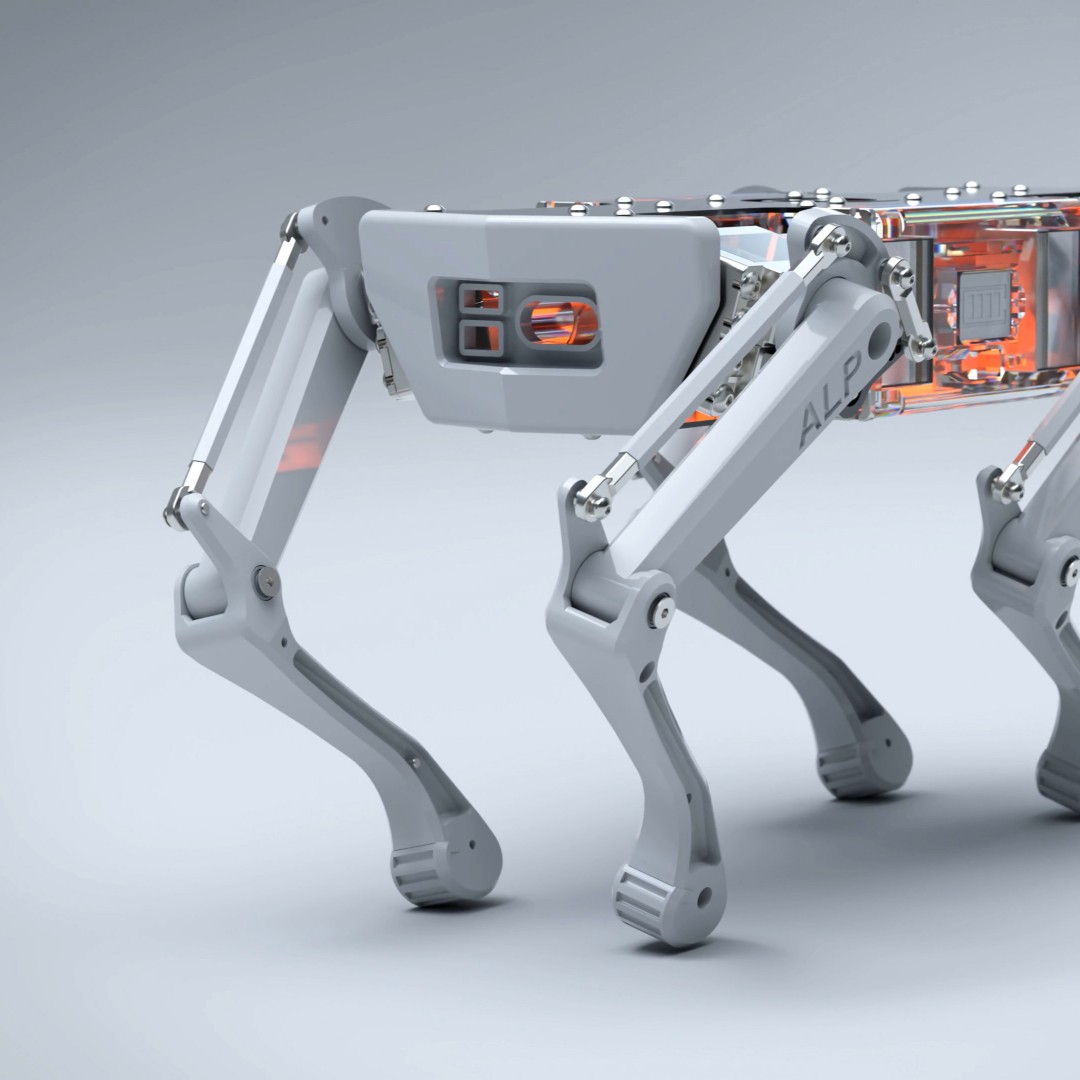
Das Ziel dieses Projekts war die Entwicklung eines prozeduralen Systems, das Aufbauanimationen für jedes Modell generiert.
In diesem Beispiel habe ich eine CAD-Datei eines Quadroped Roboters verwendet, sie in FBX konvertiert und in Houdini importiert. Indem ich jeden verbundene Mesh in ein separates packed Primitive umgewandelt habe, wird es möglich, alle Teile prozedural mit einem einzigen VEX Setup zu animieren. Das bedeutet, man kann ein anderes Objekt einfügen und sofort eine funktionierende Aufbauanimation erstellen.
/ Credits
Kunde:
Showpiece
Umfang:
CAD-Konvertierung, Prozedurale Animation, Rendering
Dauer:
2 Tage
/ Jahr
2025



ANDERE
PROJEKTE



Nehmen Sie Kontakt auf